Romi Chassis Kit - Yellow

Prices incl. VAT plus shipping costs
Ready to ship today,
Delivery time appr. 1-3 workdays
- Order number: Pololu-3504
- Manufacturer product ID: 3504
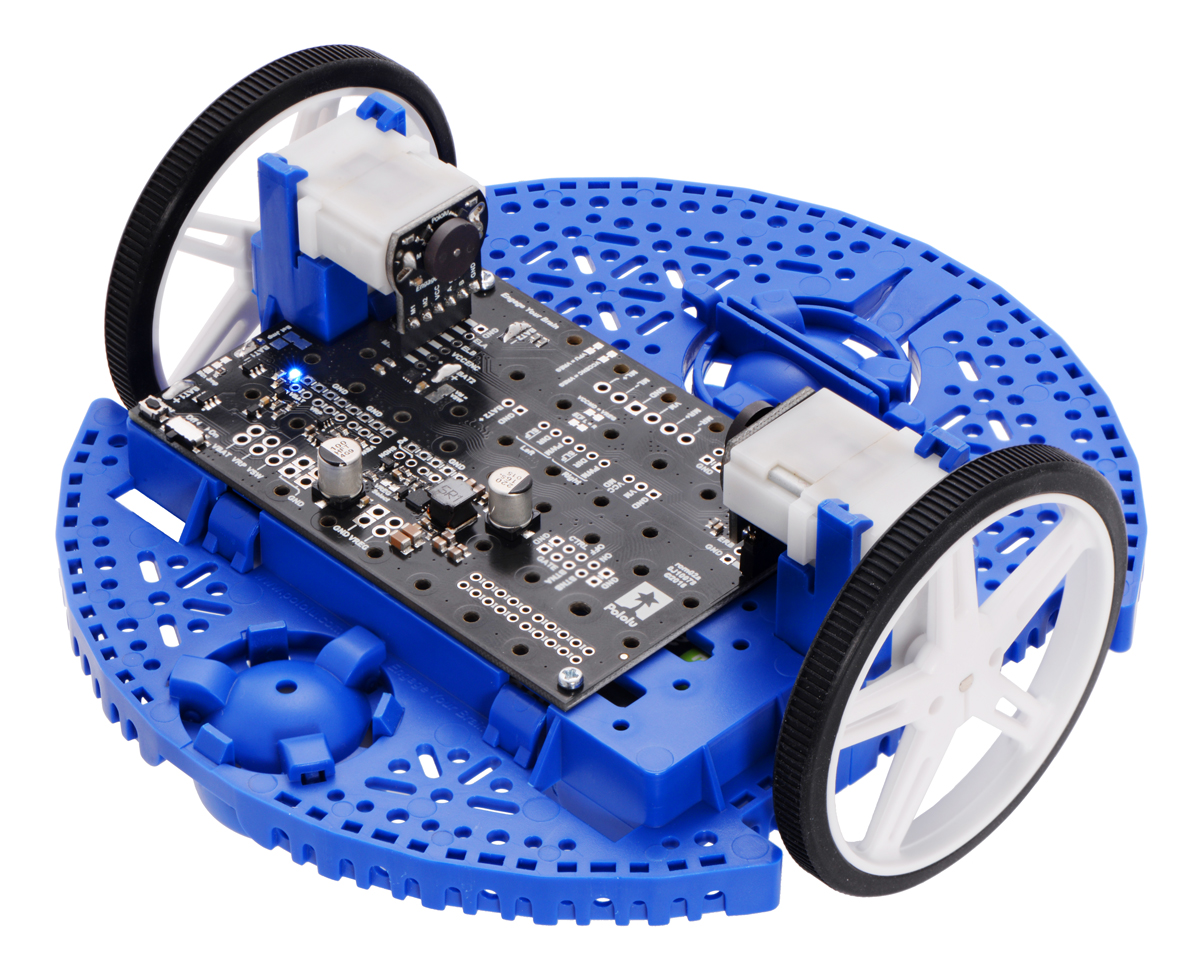
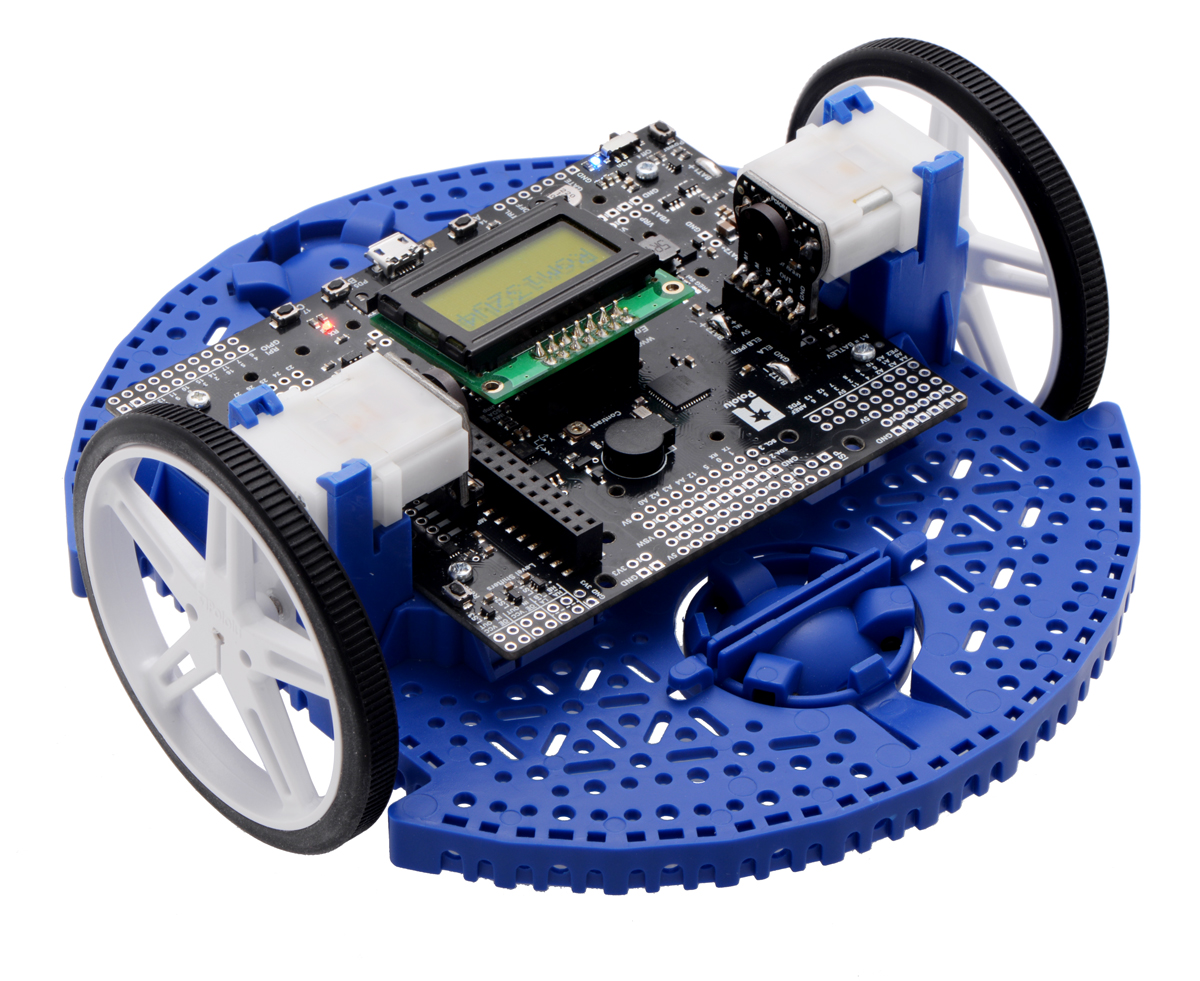
The versatile Romi chassis is a great starting point for your next mobile robot. This kit includes all the basic mechanical parts to get up and running, including two motors, two wheels, one ball caster, and battery contacts. The wheels and ball are white; all other plastic components are yellow.
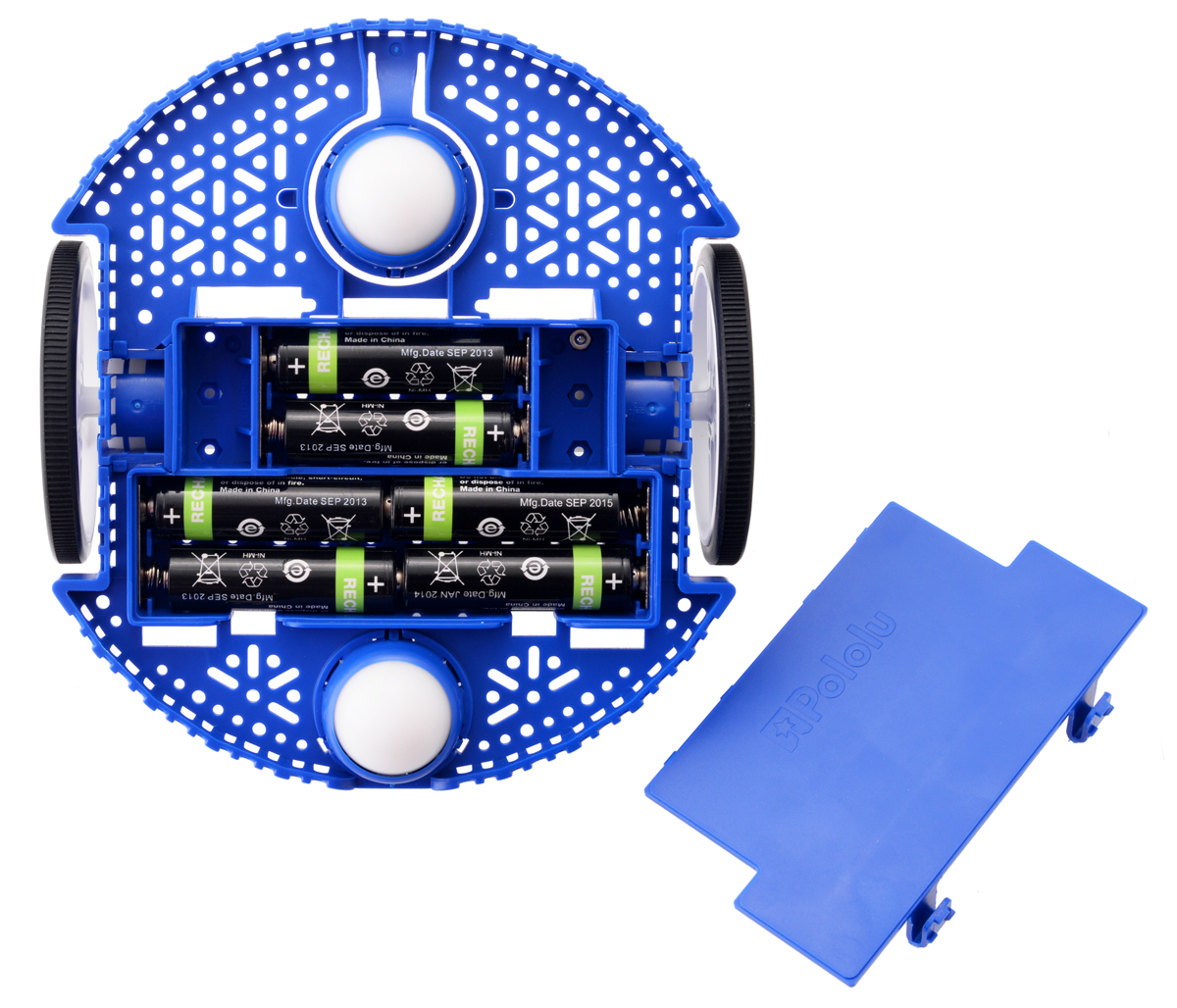
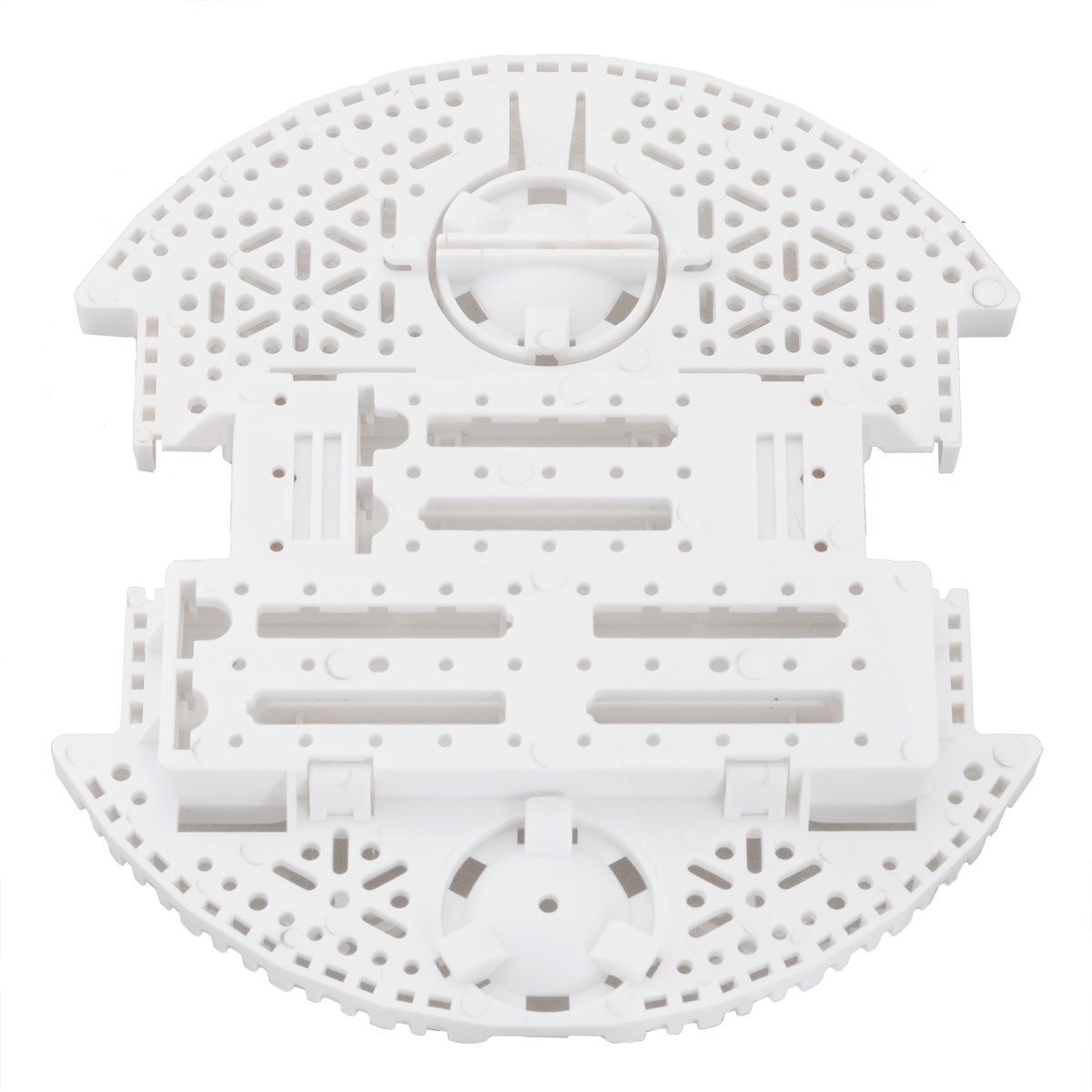
The Romi chassis is a differential-drive mobile robot platform with a diameter of 6.5″ (165 mm) and an integrated battery holder for six AA batteries (not included). The drive wheels are located on a diameter of the circular base plate, allowing for turns or spinning in place. A large, fixed ball caster in the rear provides a smooth third point of contact, and a second ball caster (not included) can optionally be added to the front. The chassis uses 70×8mm Pololu wheels and Mini Plastic Gearmotors with extended backshafts to enable quadrature encoders for position feedback.
The Romi chassis has an abundance of general-purpose mounting holes and slots intended for various sizes of screws (not included) such as #2-56, #4-40, M2, and M3. These holes can be used for mounting your electronics, such as your microcontroller, motor drivers, and sensors.
The plastic components making up the chassis are available in six colors, either individually (for use as replacement parts or to make custom color combinations) or in kits that include motors and battery contacts.
This animation shows how the parts fit together:
See the user’s guide for more complete assembly instructions.
Details for item #3504
|
|
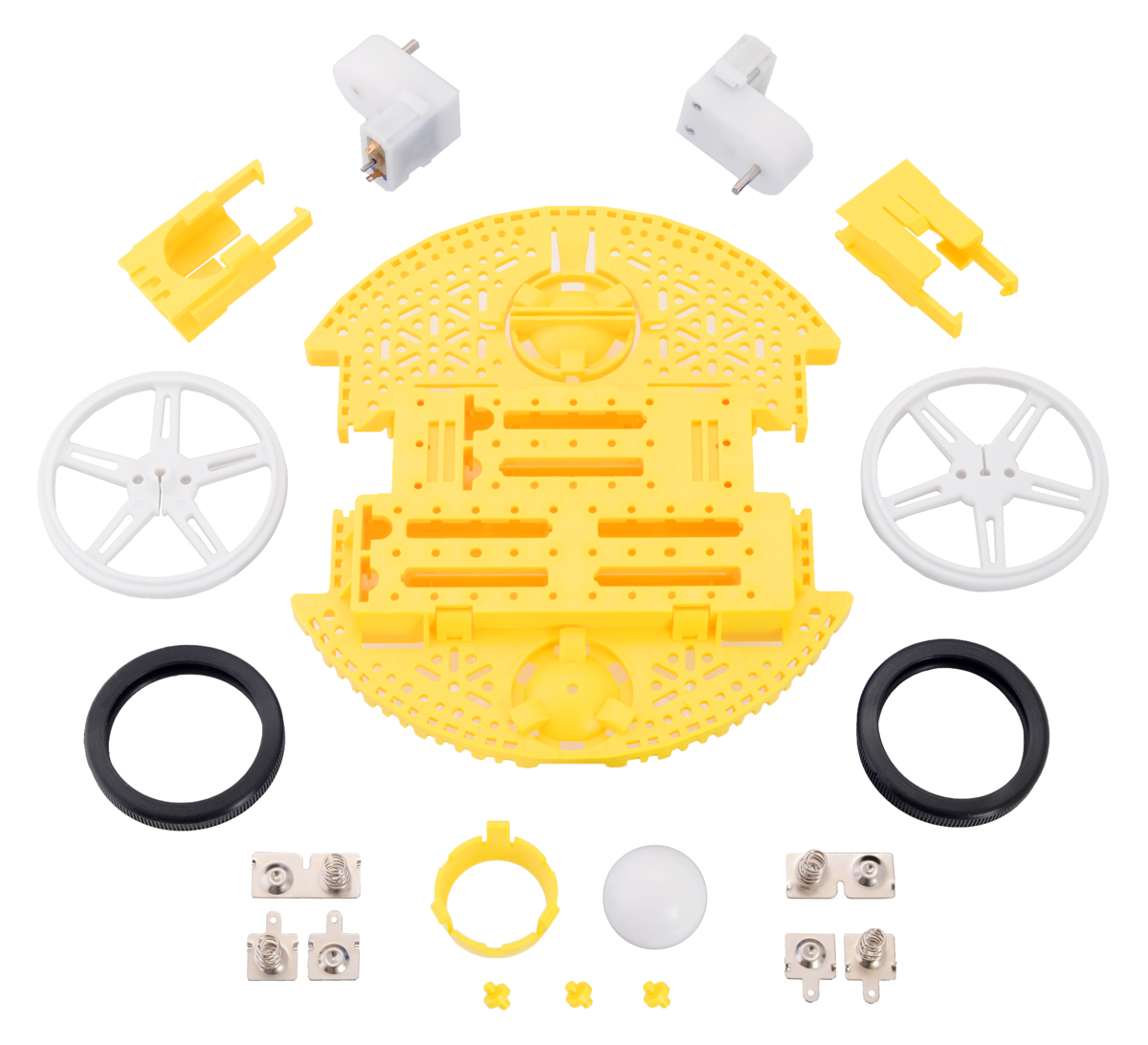

Kit contents
- One yellow Romi chassis base plate
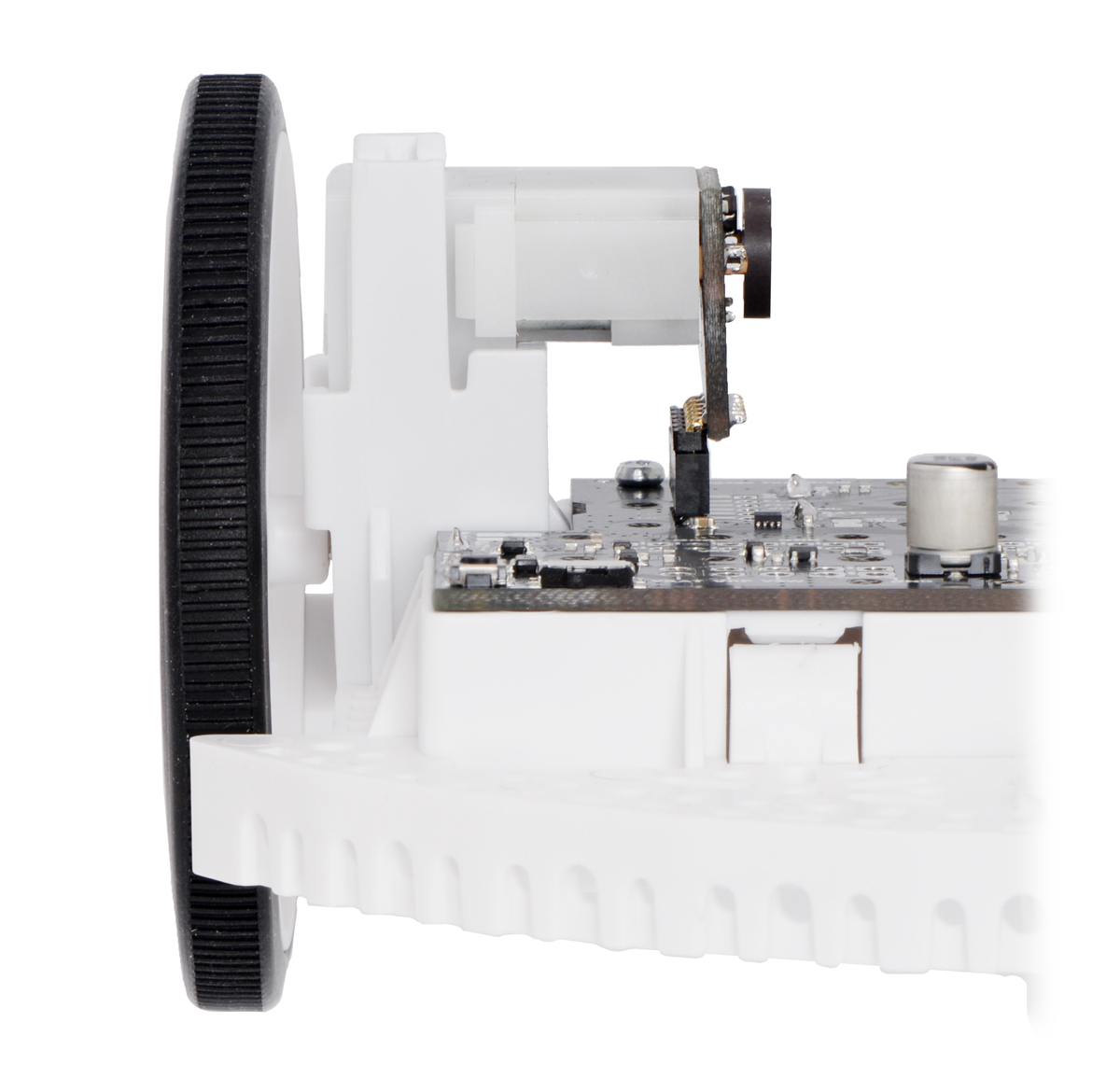
- Two mini plastic gearmotors (120:1 HP with offset output and extended motor shaft)
- A pair of yellow Romi chassis motor clips
- A pair of white 70×8mm Pololu Wheels
- One yellow Romi chassis ball caster kit
- One Romi chassis battery contact set
 |
Additional things you will need
- Six AA batteries (we recommend rechargeable AA NiMH cells); see the user’s guide for more details about power options.
- Electronics to control the motors (e.g. the Romi 32U4 Control Board).
You will likely also need a soldering iron for connecting your motors and batteries to your electronics.
Optional accessories
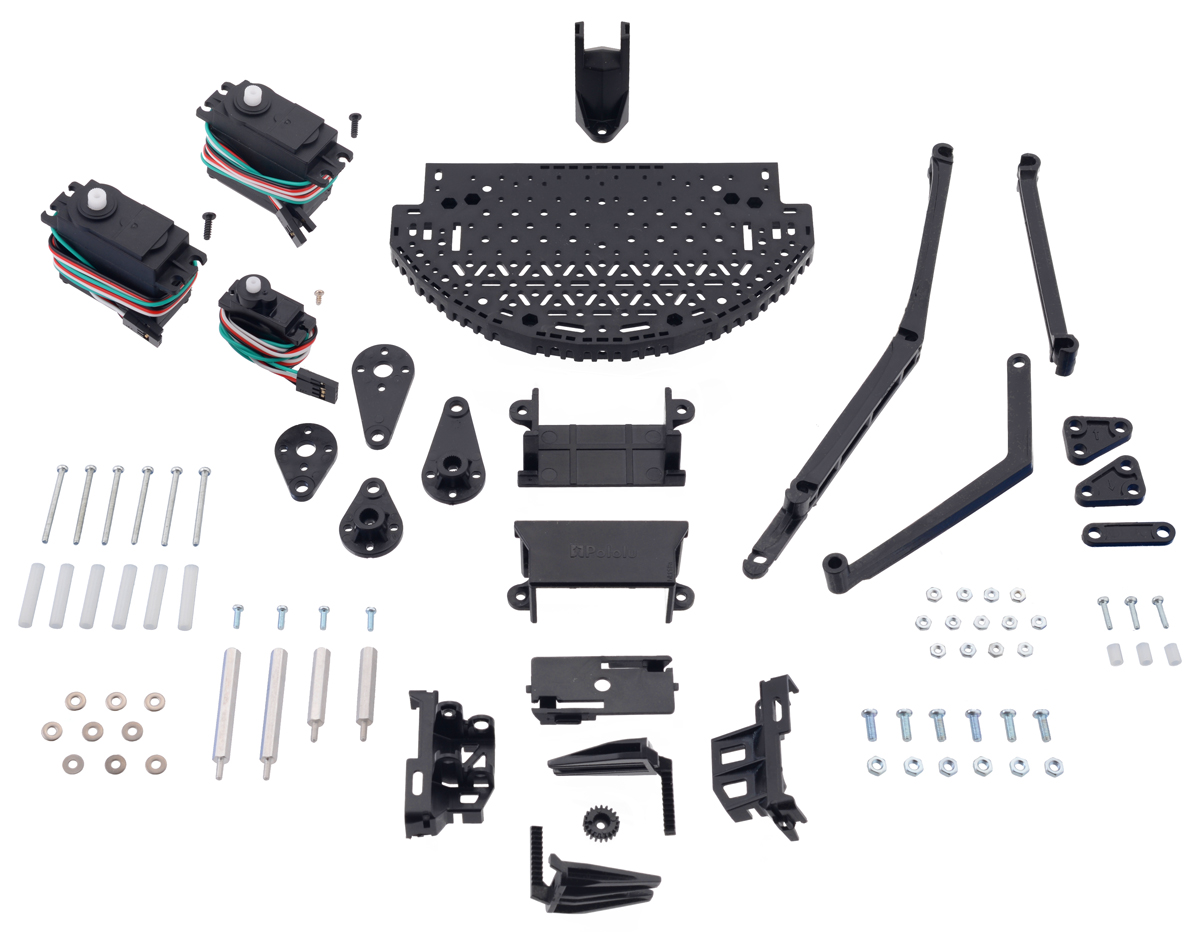
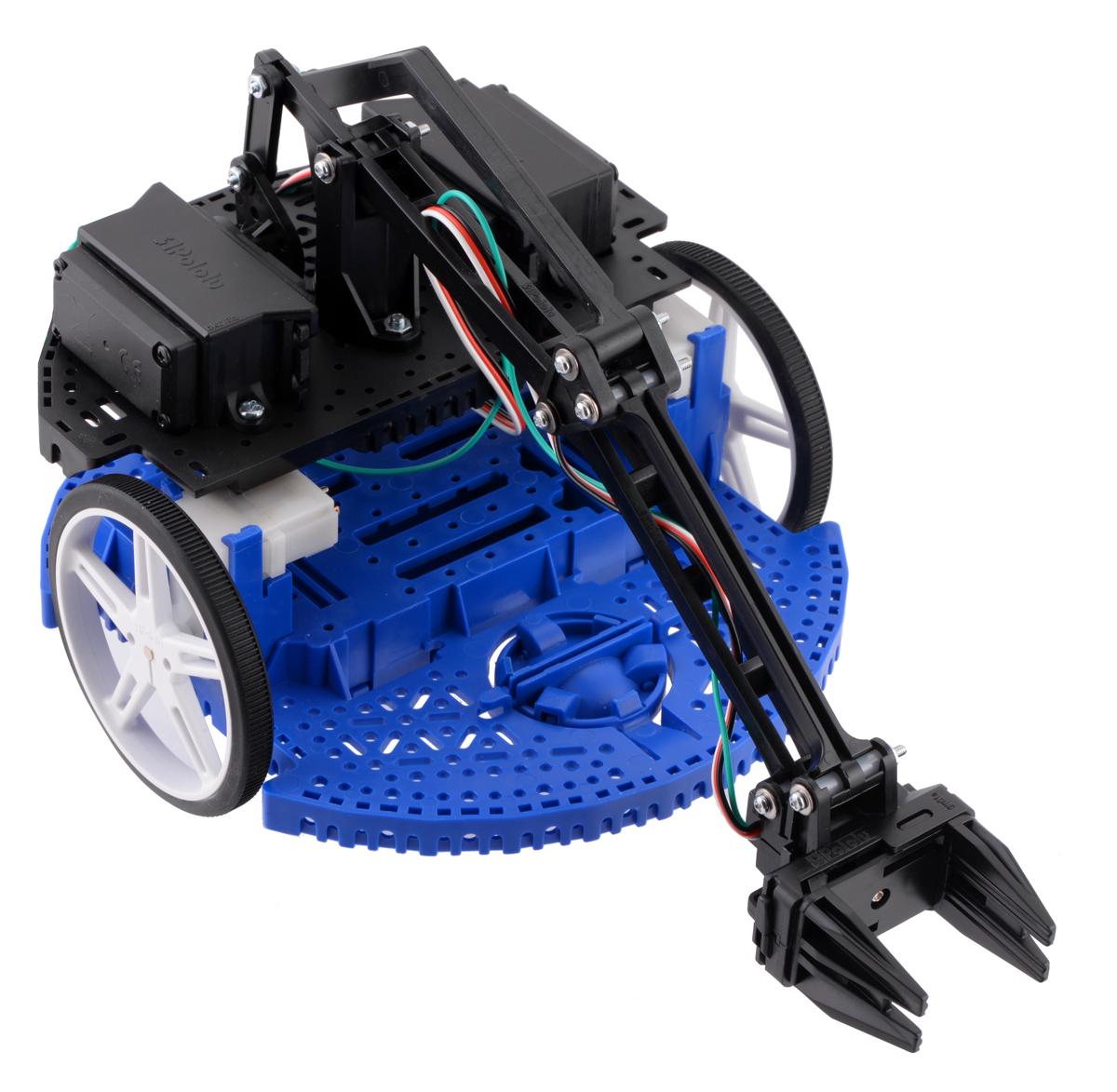
- Robot Arm Kit for Romi – Give your Romi an arm and let it manipulate its surroundings. This kit contains everything you need to build the arm, including a micro gripper and three servos, one for controlling the height of the arm, one for controlling the tilt of the gripper, and one for actuating the gripper paddles themselves. All three servos are specially modified to provide access to their feedback potentiometers, enabling higher-level closed-loop control of all three joints.
|
|
- Romi Chassis Expansion Plate – This expansion plate lets expand your Romi robot vertically by adding new tiers. It has the same diameter as the base plate, but we made it only a half circle to give you more expansion options. For a full-size expansion platform, just combine two expansion plates. This is the same plate that is included as part of the Romi robot arm kit described above.
|
|


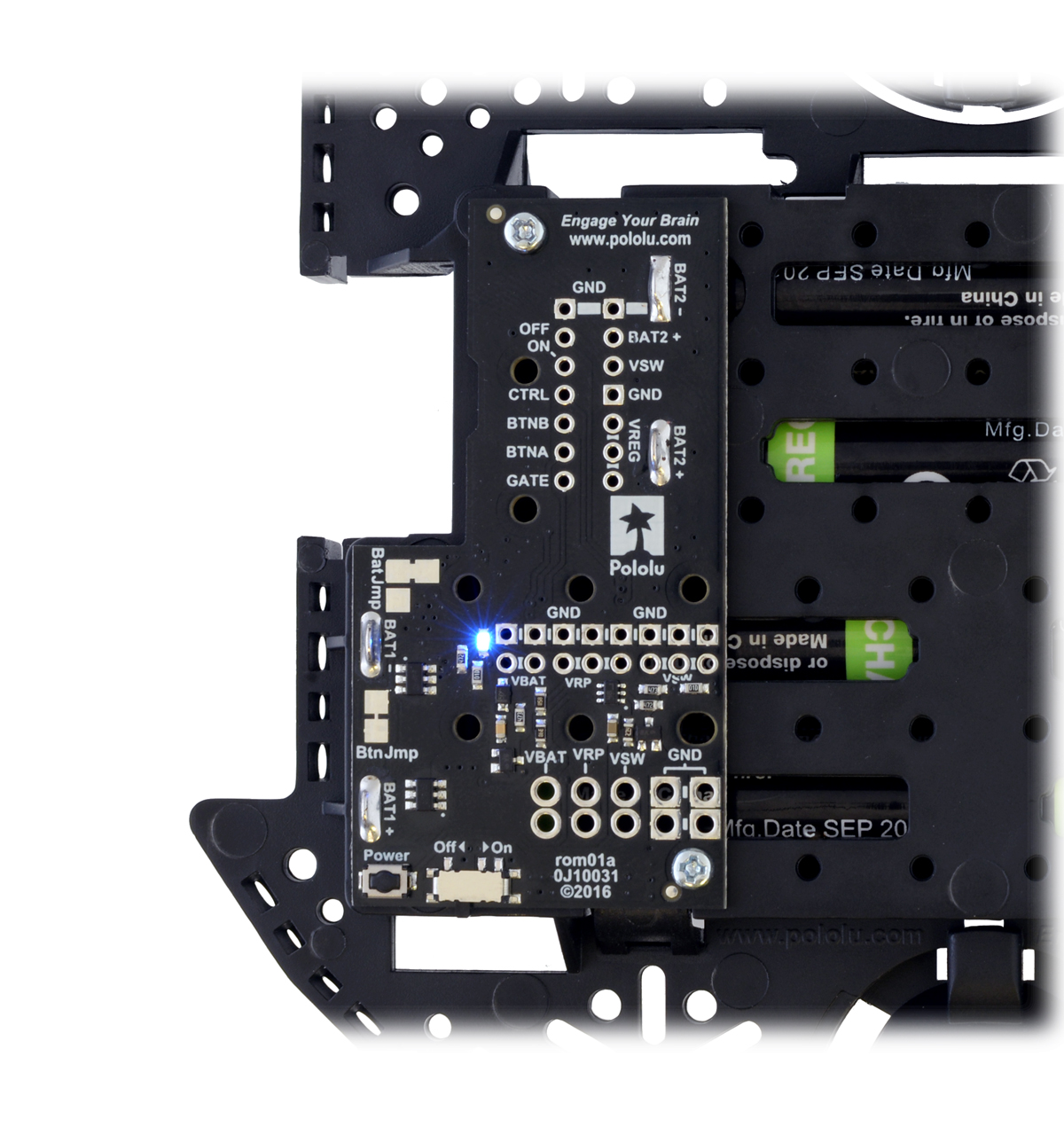
- Power Distribution Board for Romi Chassis – This board helps you get your Romi chassis running quickly. It solders to the chassis’s battery contacts and provides reverse battery protection, several power switching options, and convenient access to the various power busses.
|
|

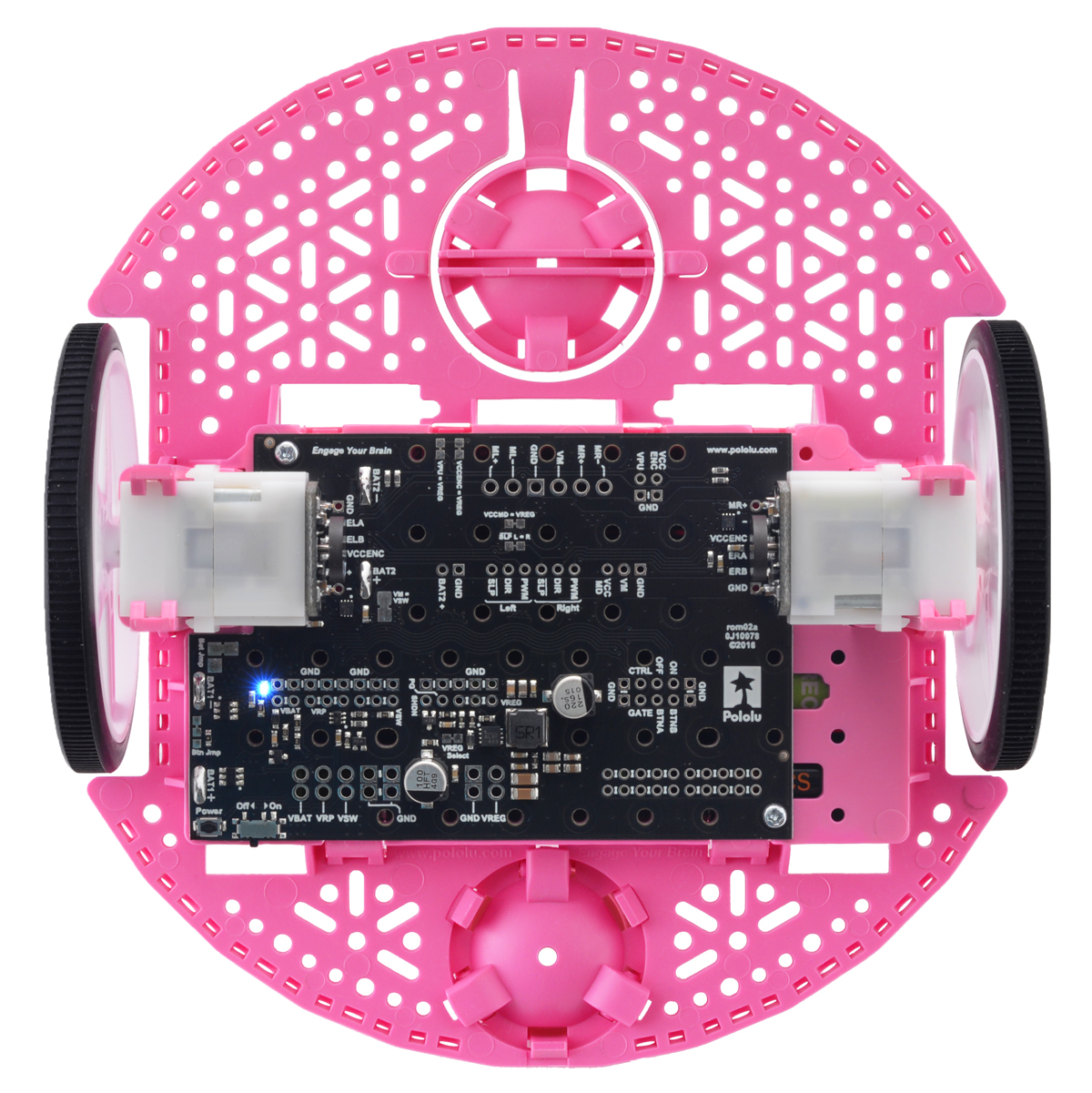
- Motor Driver and Power Distribution Board for Romi Chassis – This board is an alternative to the Power Distribution Board mentioned above. It offers the same features (reverse battery protection, multiple power switching options, and convenient access to various power busses) along with dual motor drivers and a powerful switching step-down voltage regulator that can deliver 2.5 A at 5 V or 3.3 V.
|
|
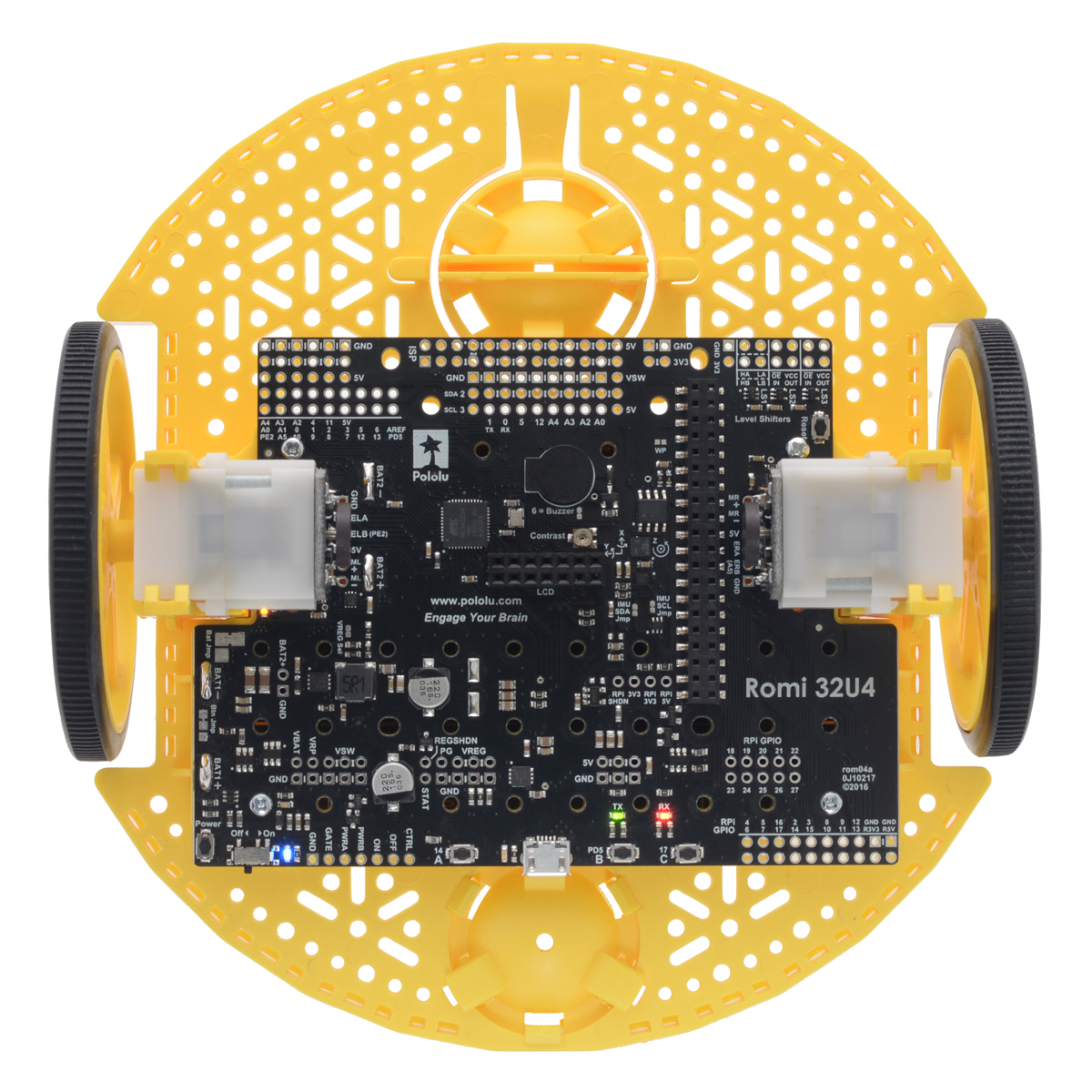
- Romi 32U4 Control Board – This board gives you everything the two boards above do and more, turning the Romi chassis into a programmable robot based on the Arduino-compatible ATmega32U4 MCU. Its features include integrated dual motor drivers, a versatile power circuit, and inertial sensors, as well as connections for quadrature encoders and an optional LCD. The board also has the ability to interface with an added Raspberry Pi, making the foundation for a complete Raspberry Pi-controlled Romi robot.
|
|
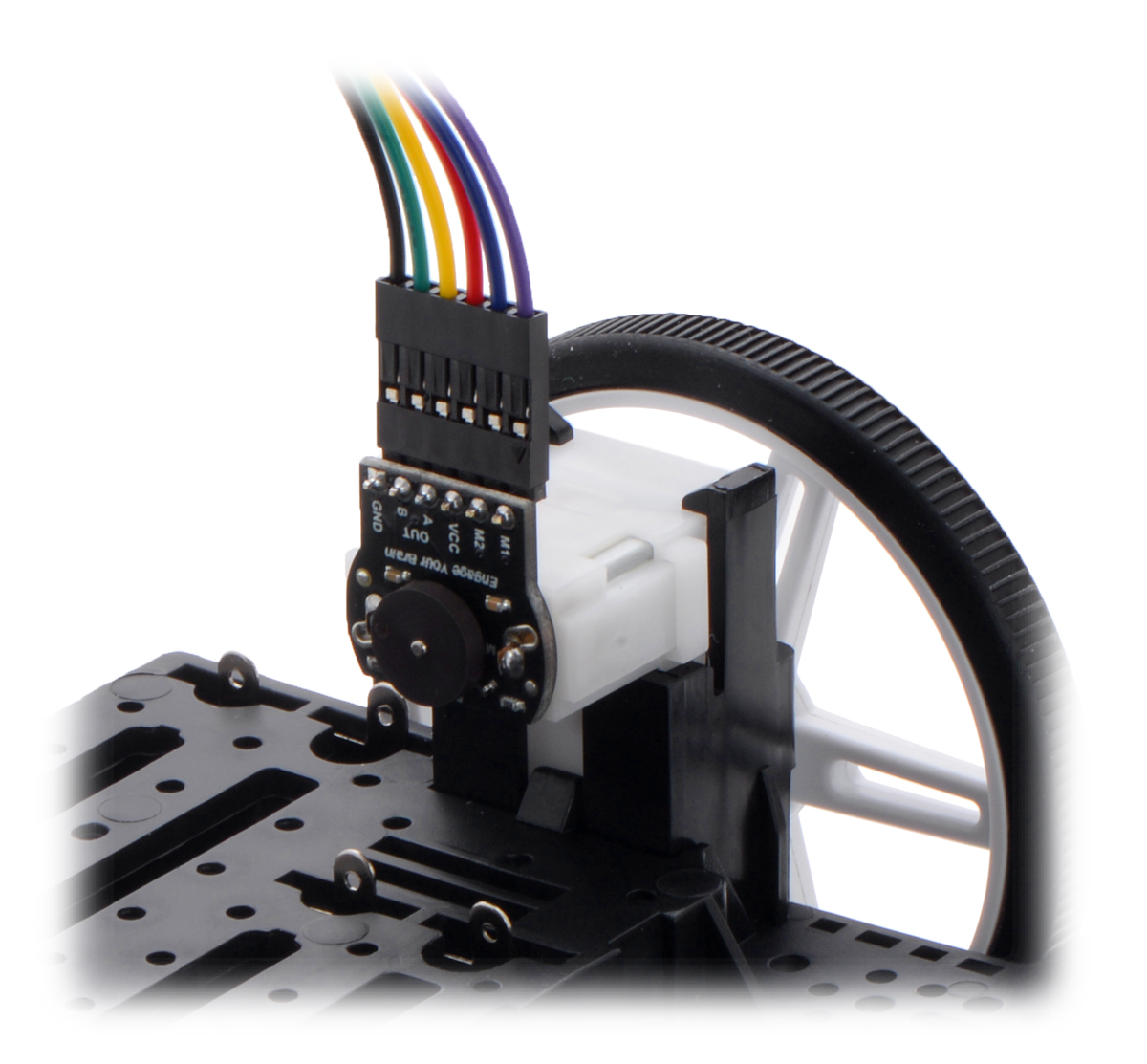
- Romi Encoder Pair Kit – Add quadrature encoders to the mini plastic gearmotors on your Romi chassis with this kit that uses a magnetic disc and Hall effect sensors to provide 12 counts per revolution of the motor shaft. These encoders can plug in directly to the Motor Driver and Power Distribution Board or the Romi 32U4 Control Board.
|
|
- Romi Chassis components – Chassis components are available individually for use as spare parts or for those who want to put together their own Romi chassis with the color combinations of their choosing.
|
| ||||
|
|


- Sensors.
- Hardware (such as stand-offs, spacers, and fasteners).
Dimensions
| Size: | 163 × 149 × 70 mm |
|---|---|
| Weight: | 160 g1 |
General specifications
| Color: | yellow |
|---|
Notes:
-
- Without batteries.