MyCobot 280 Jetson Nano




- Order number: ER-mycobot-280-Jetson-Nano
- Manufacturer product ID: ER-mycobot-280-Jetson Nano
ADVANCED AI LEARNING :- Based on Jetson Nano AI board, myCobot 280 Jetson Nano is capable for a quick image processing, robotic algorithm developments, ROS simulation learning, etc.

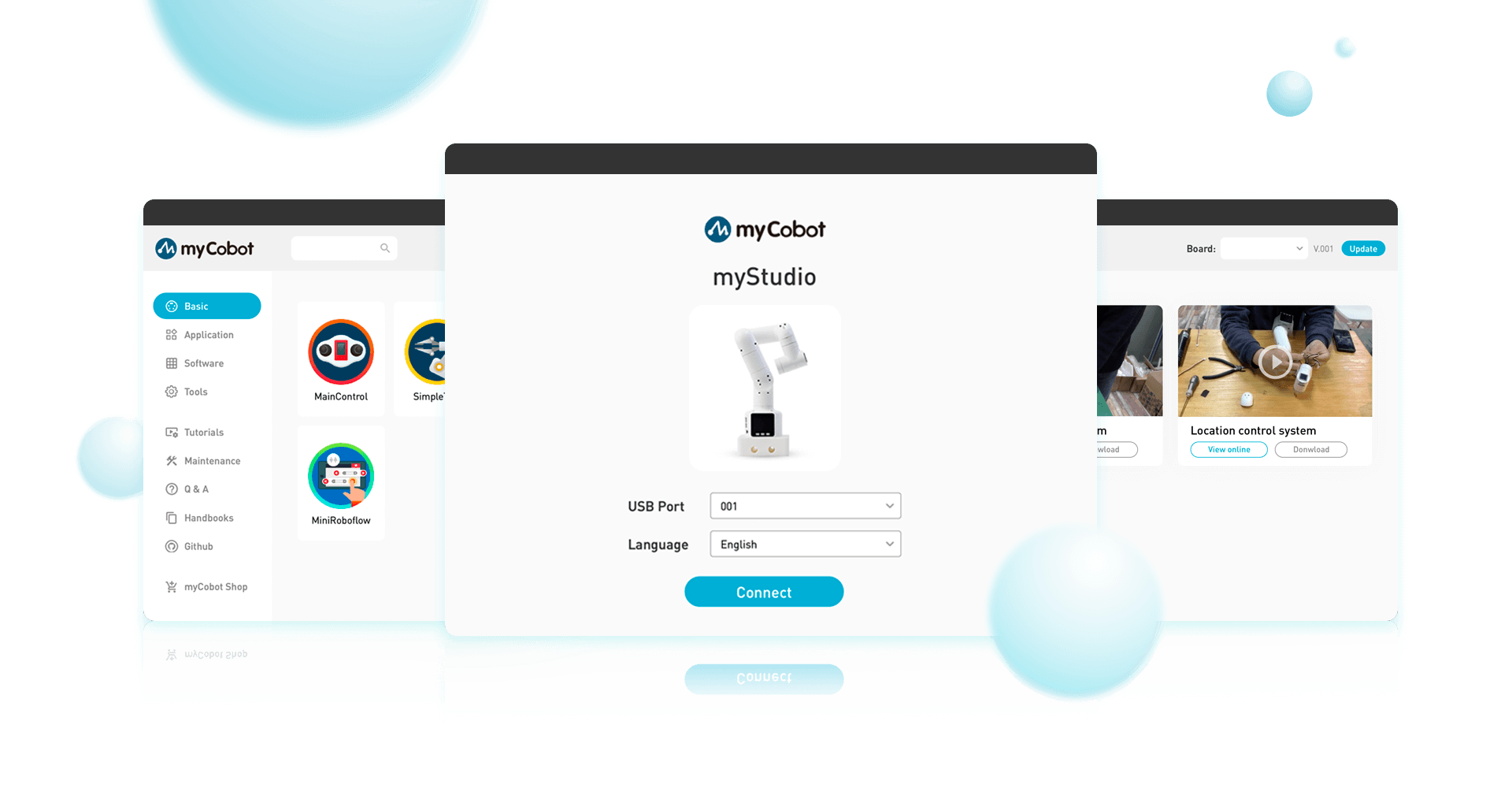
OPEN-SOURCE ECOSYSTEM :- With original Jetson Nano open-source ecosystem, myCobot 280 Jetson Nano provides abundant interfaces for secondary developments, Python drive library and built-in ROS environment, which simplify and fasten your developing.

PARAMETERS :
-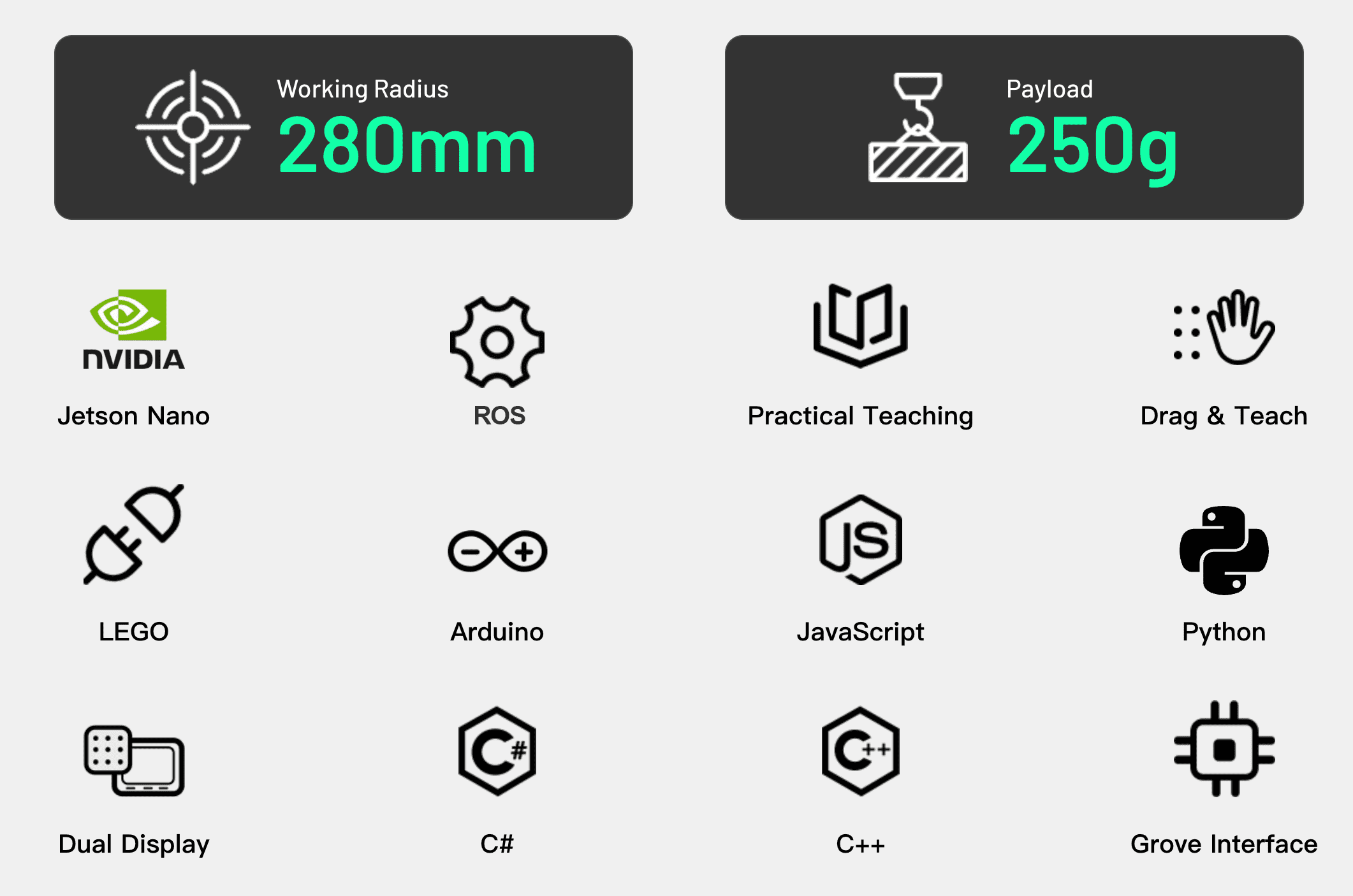
EXCELLENT CONFIGURATION :- myCobot is equipped with complicated and intelligent configuration, which highly satisfies your demands of creative secondary developments.
ABUNDANT INTERFACES :-Combined with Jetson Nano and robot, speed up your developments with open-source interfaces.
HANDS-ON LESSON :- Based on myBlockly and Python, myCobot blazes a new path of Artificial Intelligence, and enriches your roboitcs knowledge in the long term.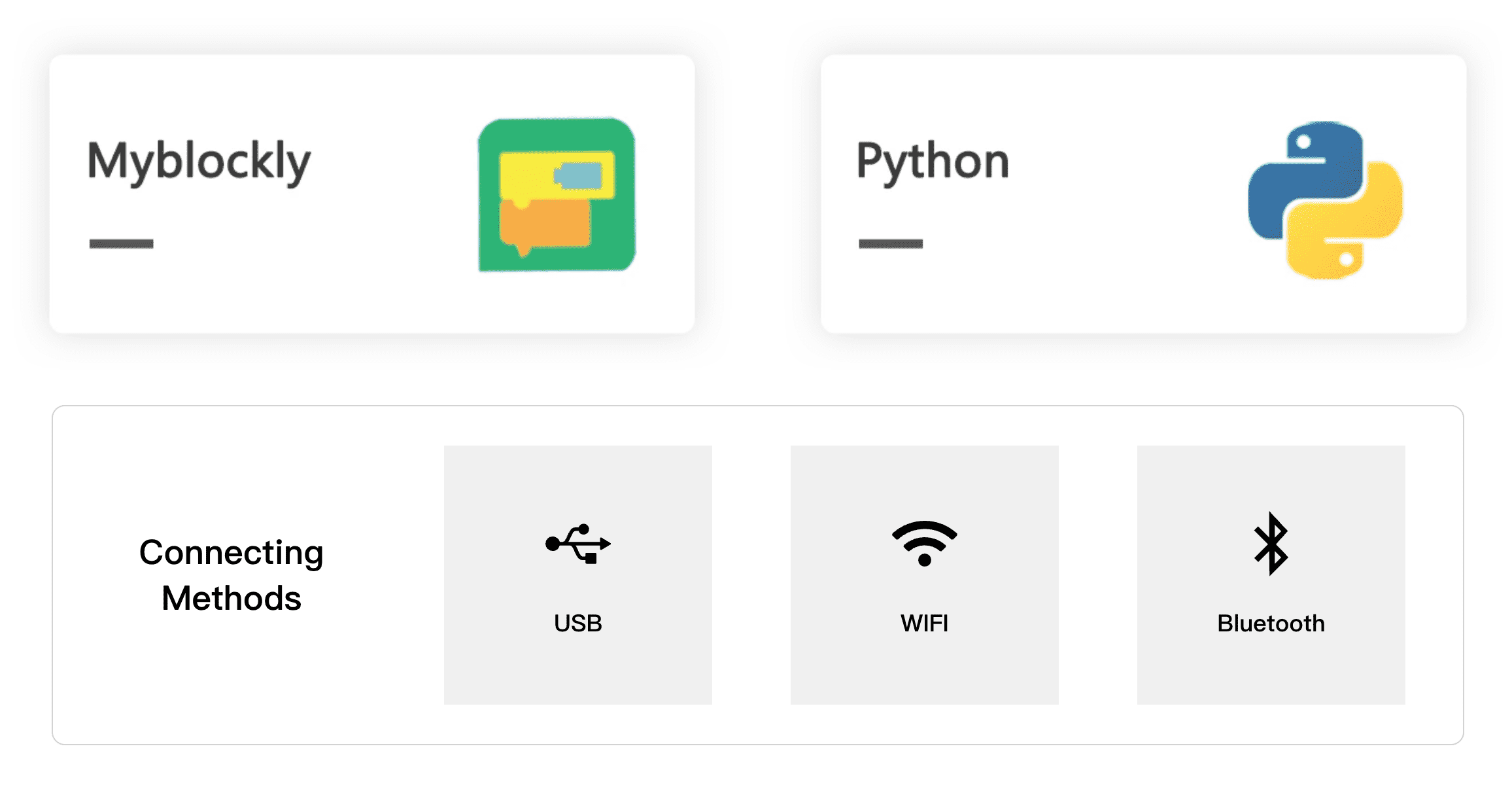
ROS SUPPORTING :-With a built-in ROS language, it’s capable to simplify 6 DOF movements under Ubuntu18.04 System.
MYCOBOT 280 JETSON NANO UNBOXING :-